Crédits photos : Hiwonder
Robot éducatif programmable camera 3D roues holonomes Jetrover
Retrouvez plus d'informations sur le produit ci-dessous.
JetRover est un robot ROS composite développé pour les scénarios d'éducation ROS.

Il prend en charge les châssis à 3 mouvements : roue Mecanum, Ackerman et châssis Tank.
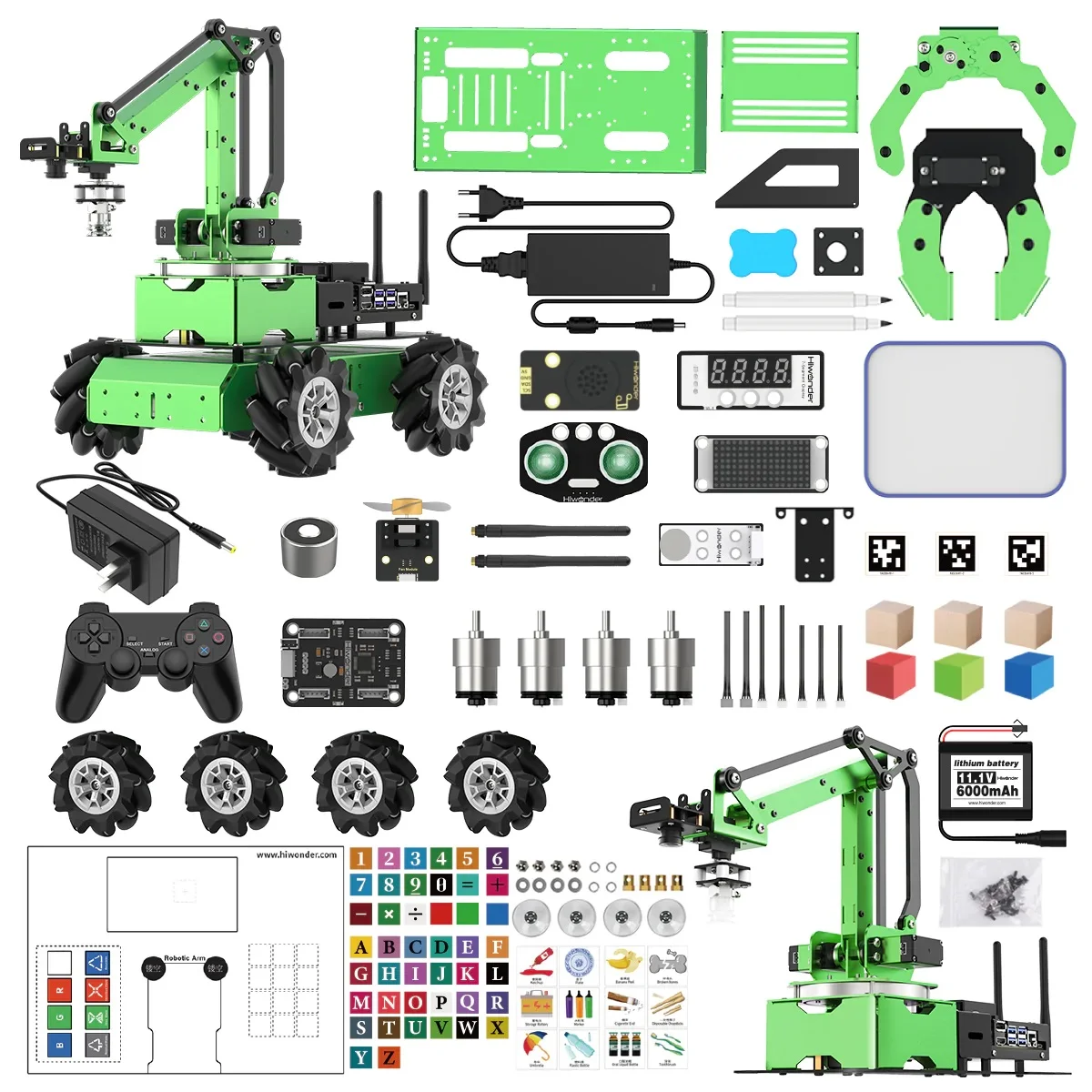
JetRover est équipé de NVIDIA Jetson ou Raspberry Pi, d'un moteur d'encodage magnétique haute performance et d'un bras robotique à 6 degrés de liberté. Les configurations matérielles haute performance telles que lidar, caméra de profondeur 3D, écran LCD de 7 pouces et réseau de microphones à champ lointain peuvent réaliser le contrôle du mouvement par robot, la navigation de cartographie, la planification des chemins, le suivi et l'évitement d'obstacles, la conduite autonome, l'atttauration 3D, la navigation et la manipulation, et l'interaction somatosensorielle, l'interaction vocale en champ lointain, la formation de contrôle de groupe et d'autres applications. Le robot de voiture JetRover déploie également une IA générative multimodale pour prendre en charge des applications d'IA incorporées plus avancées. Pour vous aider à libérer son plein potentiel, nous proposons des codes open source et des ressources d'apprentissage pour inspirer et soutenir vos projets d'IA.

Bras de robot 6DOF, servo de bus intelligent
Le robot JetRover est équipé d'un bras de robot 6DOF et d'un servo haute tension de bus à couple élevé, ce qui étend considérablement l'endurance du robot.

Navigation de cartographie LiDAR SLAM
Hiwonder JetRover est équipé d'un lidar, qui peut réaliser la cartographie et la navigation SLAM. Et il prend en charge la planification des chemins, la navigation à virgule fixe et l'abondance dynamique des obstacles.

Vision de profondeur FPV (vue à la première personne)
JetRover est équipé d'un bras robotique à 6 degrés de liberté, équipé d'une caméra de profondeur 3D haute performance à l'extrémité, qui peut réaliser la reconnaissance, le suivi et la saisie des cibles.

Réseau de microphones à champ forn 6CH
Le réseau de microphones à champ loin 6CH et les haut-parleurs prennent en charge le positionnement des sources sonores, le contrôle de reconnaissance vocale, la navigation vocale et d'autres fonctions.

Intégration du grand modèle d'IA avec la cartographie et la navigation SLAM
La voiture Hiwonder JetRover combine un grand modèle multimodal d'IA pour comprendre les commandes vocales de l'utilisateur via un grand modèle de langage d'IA, permettant une navigation multipoint. Une fois que JetRover arrive à l'endroit désigné, il utilise un modèle de langage de vision pour acquérir une compréhension approfondie des objets et des événements environnants. Cette approche améliore considérablement l'intelligence, l'adaptabilité et l'expérience utilisateur globale du robot, ce qui le rend mieux adapté à répondre aux besoins du monde réel.

Compréhension sémantique

Perception environnementale

Navigation intelligente

Compréhension de la scène

Applications d'IA générative incorporées

Interaction de la vision de l'IA
Suivi de la cible KCF

Ligne de vision suivant

Reconnaissance et suivi des couleurs
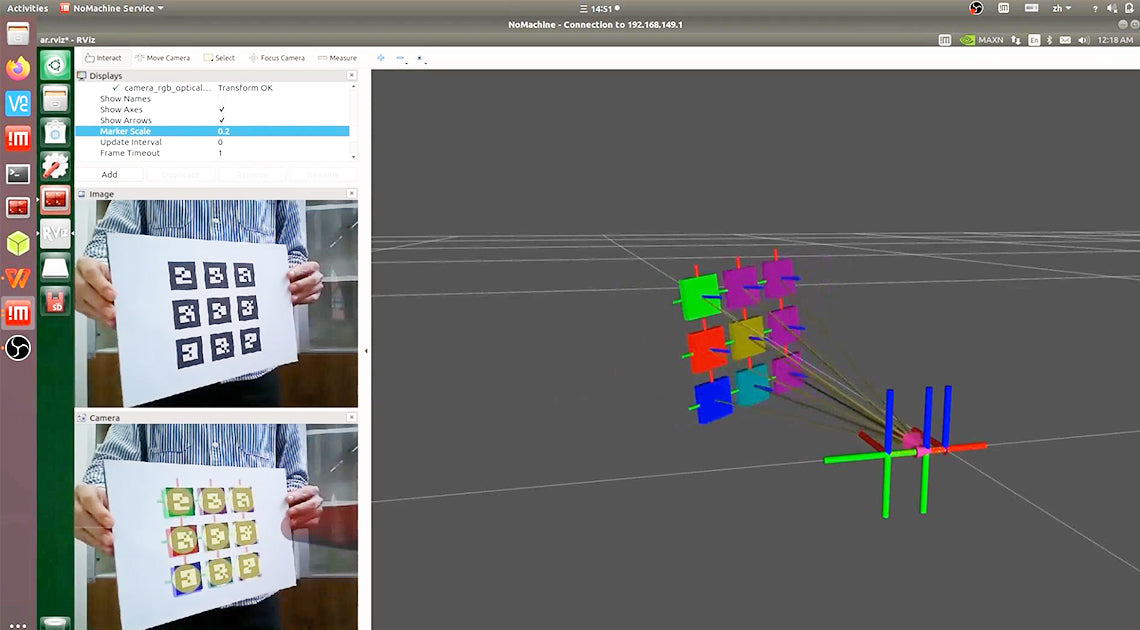
Réalité augmentée AR

Développement MediaPipe, interaction améliorée de l'IA

Cadre d'apprentissage profond de l'IA