Crédits photos : Instar robotics
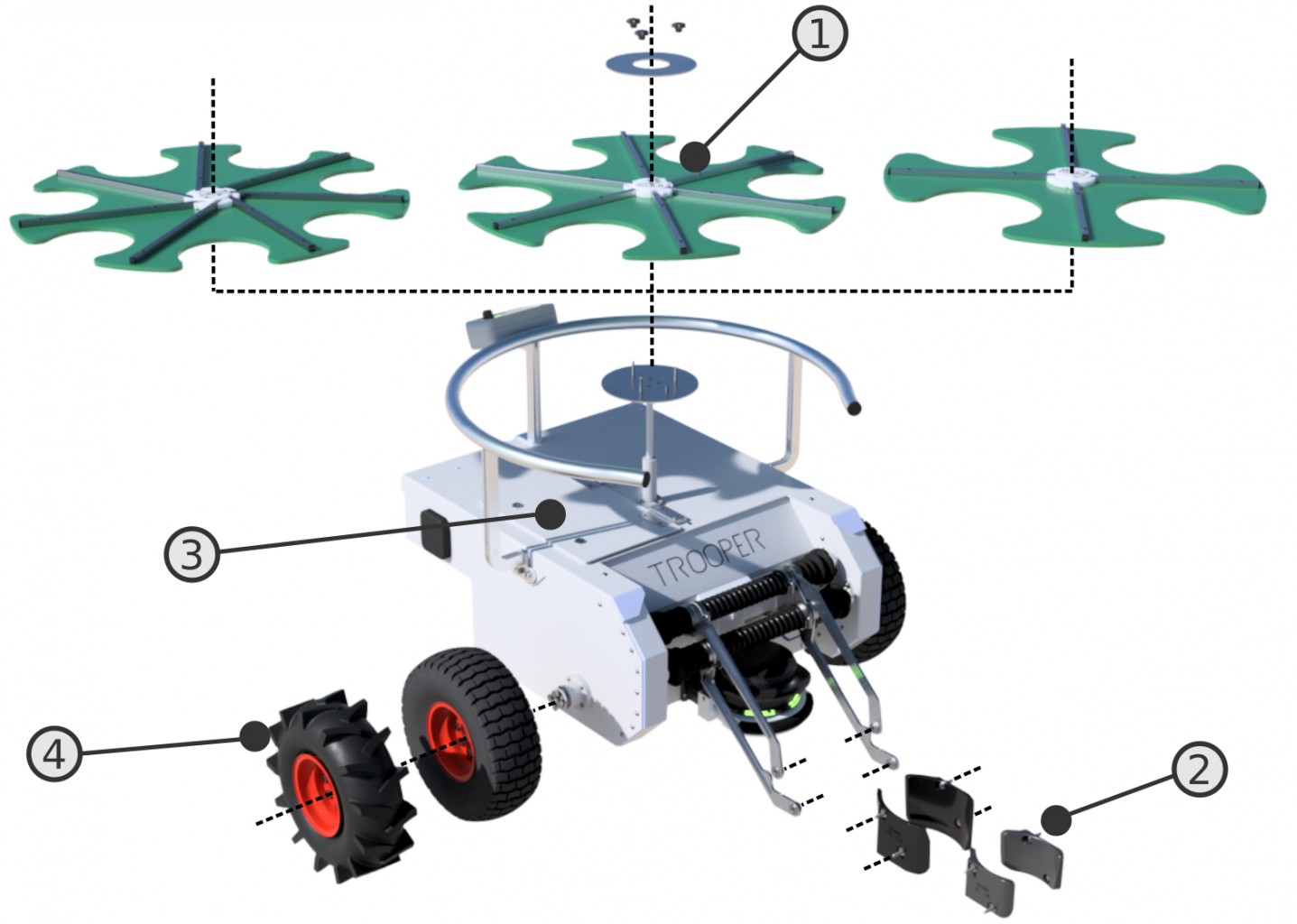
Robot Jardinage domestique Trooper Instar robotics
Le robot de jardinage domestique Trooper d'Instar Robotics est un compagnon automatisé conçu pour entretenir et améliorer votre jardin. Équipé d'une intelligence artificielle avancée, le Trooper peut tondre la pelouse, tailler les haies, éliminer les mauvaises herbes et arroser les plantes de manière autonome. Grâce à ses capteurs et à sa connectivité intelligente, il navigue en toute sécurité dans votre jardin, s'adaptant aux obstacles et aux différents types de terrain.
Catégories : Robot Jardinerie
PAIEMENT & SECURITÉ
 Payer avec Visa
Payer avec Visa
 Payer avec MasterCard
Payer avec MasterCard
Payer avec PayPal
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer