Crédits photos : Non disponible
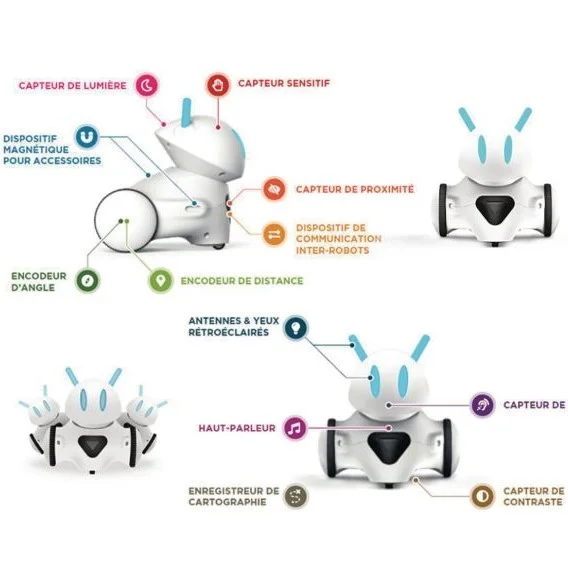
Robot éducatif à souder éviteur d'objet (fin de production)
UGS : 270-CET-160
59.00€ TTC
Catégories : Robot Jouet Educatif Robot à Souder et Programmer
PAIEMENT & SECURITÉ
Payer avec PayPal
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer