Robot humanoïde mouvement flexible plate-forme open source DARWIN-OP Robotis
UGS : DAR-OBR-WIN
DARwIn-OP est un robot humanoïde miniature abordable avec une puissance de calcul avancée, des capteurs sophistiqués, une capacité de charge utile élevée et une capacité de mouvement dynamique pour permettre de nombreuses activités de recherche et d'éducation passionnantes.
DARwIn-OP (Dynamic Anthropomorphic Robot with Intelligence-Open Platform) est une plate-forme de robot humanoïde miniature abordable avec une puissance de calcul avancée, des capteurs sophistiqués, une capacité de charge utile élevée et une capacité de mouvement dynamique pour permettre de nombreuses activités de recherche et d'éducation passionnantes.
Open source et plateforme complètement ouverte
La désignation “open source” s'applique aux logiciels dont la licence respecte des critères précisément établis par l'Open Source Initiative, c'est-à-dire la possibilité de libre redistribution, d'accès au code source et aux travaux dérivés.
La plateforme DARwIn-OP est complètement ouverte grâce à :
sa base d'ordinateur PC fonctionnant avec le système d'exploitation Linux-Ubuntu ;
des spécifications matérielles disponibles (carte électronique, modèle 3D) ;
des spécifications logicielles disponibles (codes sources et kit de composant logiciel) ;
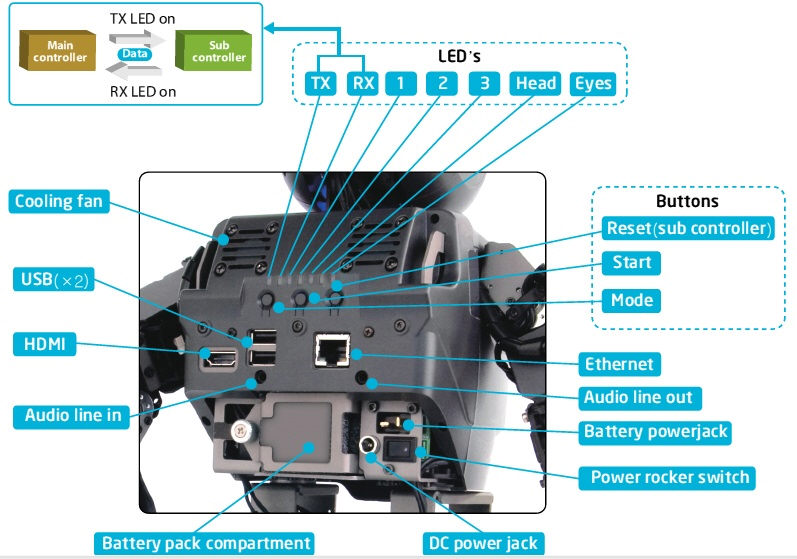
des extensions possibles avec 13 entrées / sorties et un port analogique / digital ;
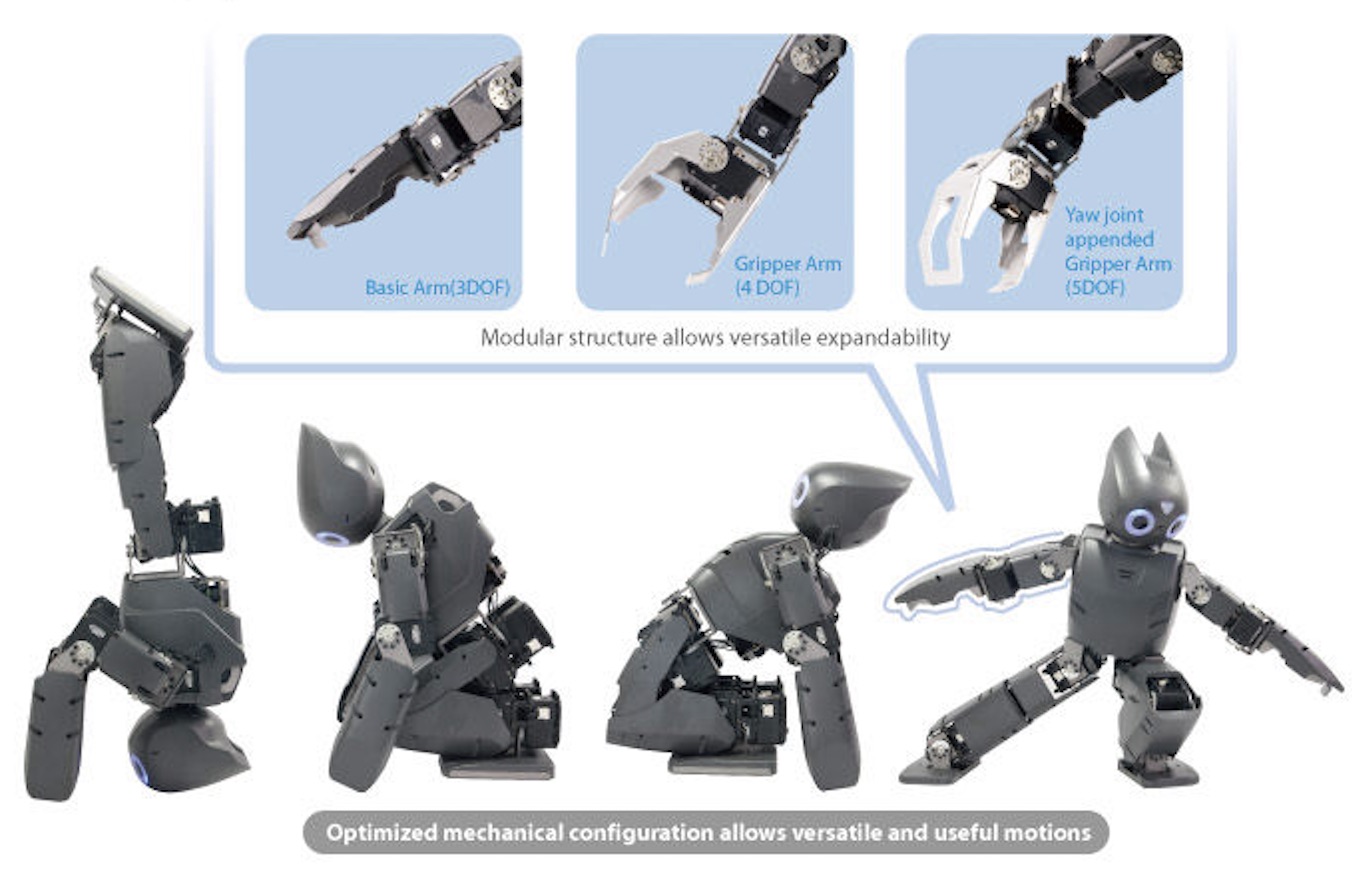
une structure modulaire pour une maintenance aisée.
Haute performance et fonctionnalités avancées
Vitesse de marche par défaut : 24,0 cm/s (9,44 in/s) 0,25 sec/pas - démarche modifiable par l'utilisateur
•PC intégré : 1,6 GHz Intel Atom Z530 embarqué 4 Go flash SSD
• Contrôleur de gestion (CM-730) : ARM CortexM3 STM32F103RE 72 MHz




 Payer avec Visa
Payer avec Visa
 Payer avec MasterCard
Payer avec MasterCard
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer