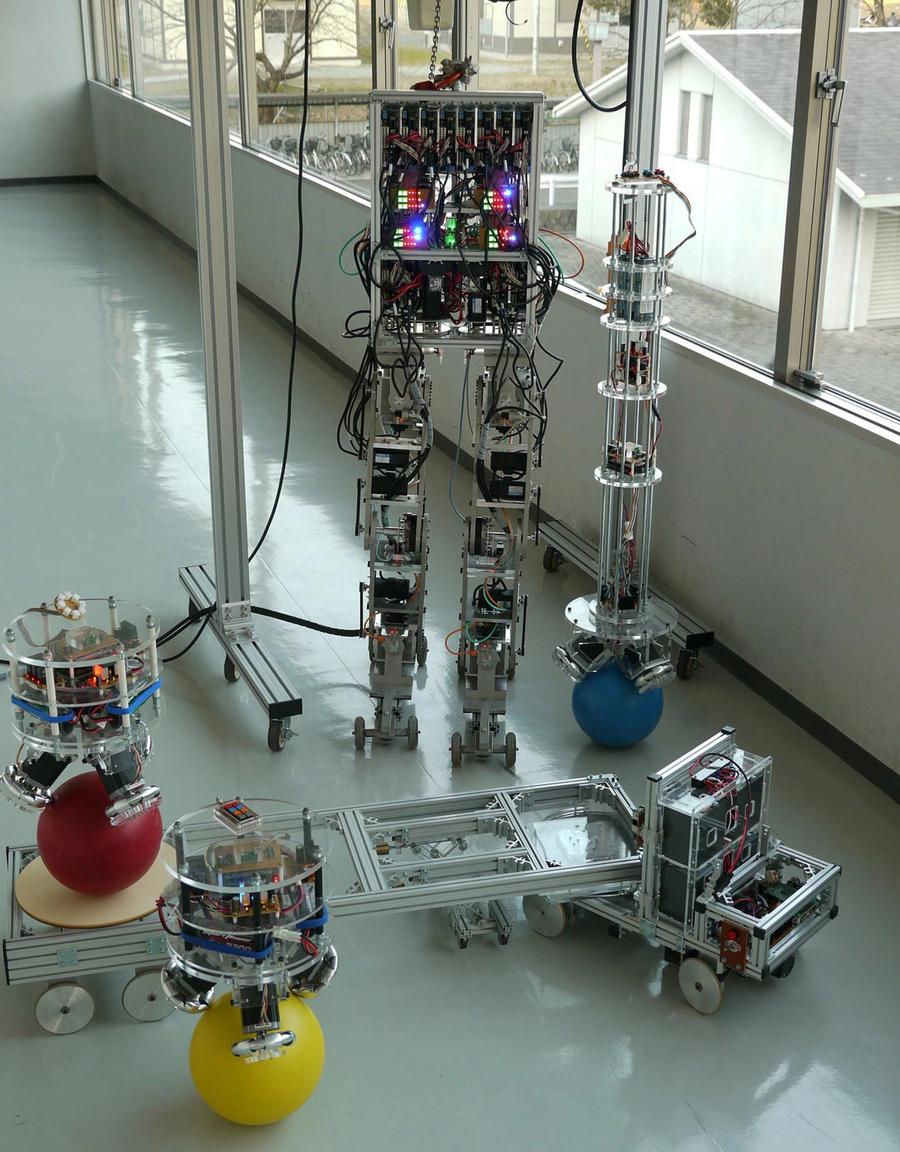
Le robot Ballip est conçu par le Dr Masaaki Kumagai, directeur du laboratoire de développement robotique de l’Université de Tohoku Gakuin au Japon, et par un des ses étudiants Takaya Ochiai.
Ce robot, en plus de tenir parfaitement en équilibre sur un ballon, est capable de tenir des charges allant jusqu’à 10 kg, comme un parpaing.
Il dispose de plusieurs mode de fonctionnement :
L’équilibre pur : Toute les contraintes extérieures sont contrées, et il tend à retourner à sa position initiale tout en restant en équilibre.
La navigation : A l’aide d’une télécommande, il est possible de le diriger.
Le suivi autonome : IL accepte les contrainte pour suivre une direction tout en gardant l’équilibre.
Le mode « suivi autonome » est très intéressant car ce robot devient une aide pour déplacer des objets encombrants tout en gardant son équilibre.



 Payer avec Visa
Payer avec Visa
 Payer avec MasterCard
Payer avec MasterCard
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer