Robot de construction à programmer voiture JetAuto Pro ROS avec bras robotique Vision Jetson Nano Mapping Navigation Python Lidar SLAMTEC A1
2,359.00€ TTC
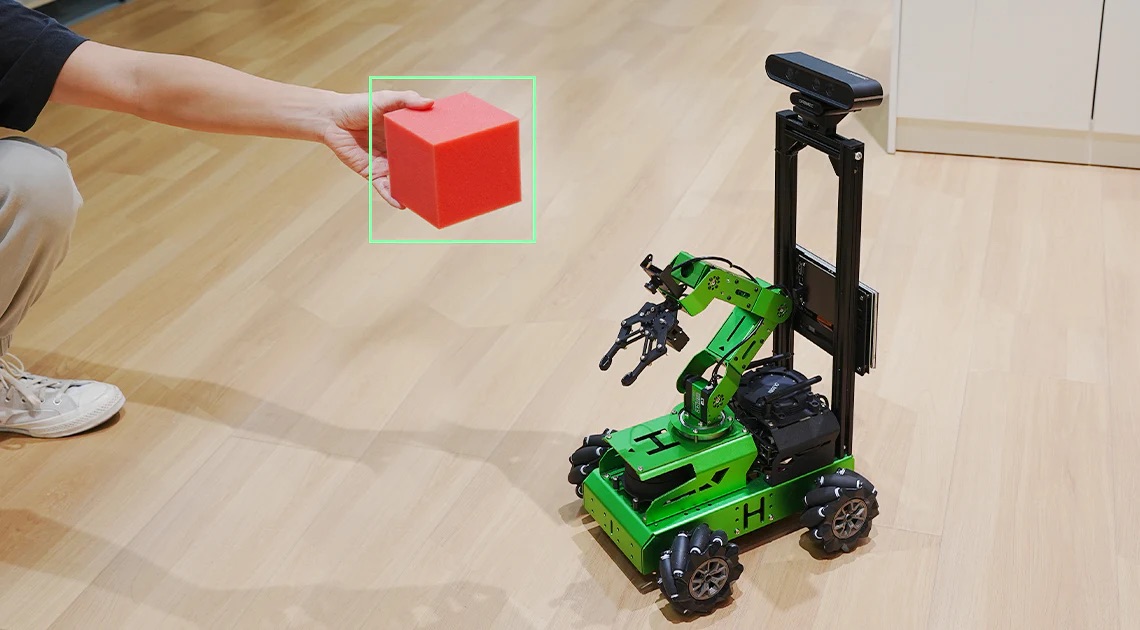
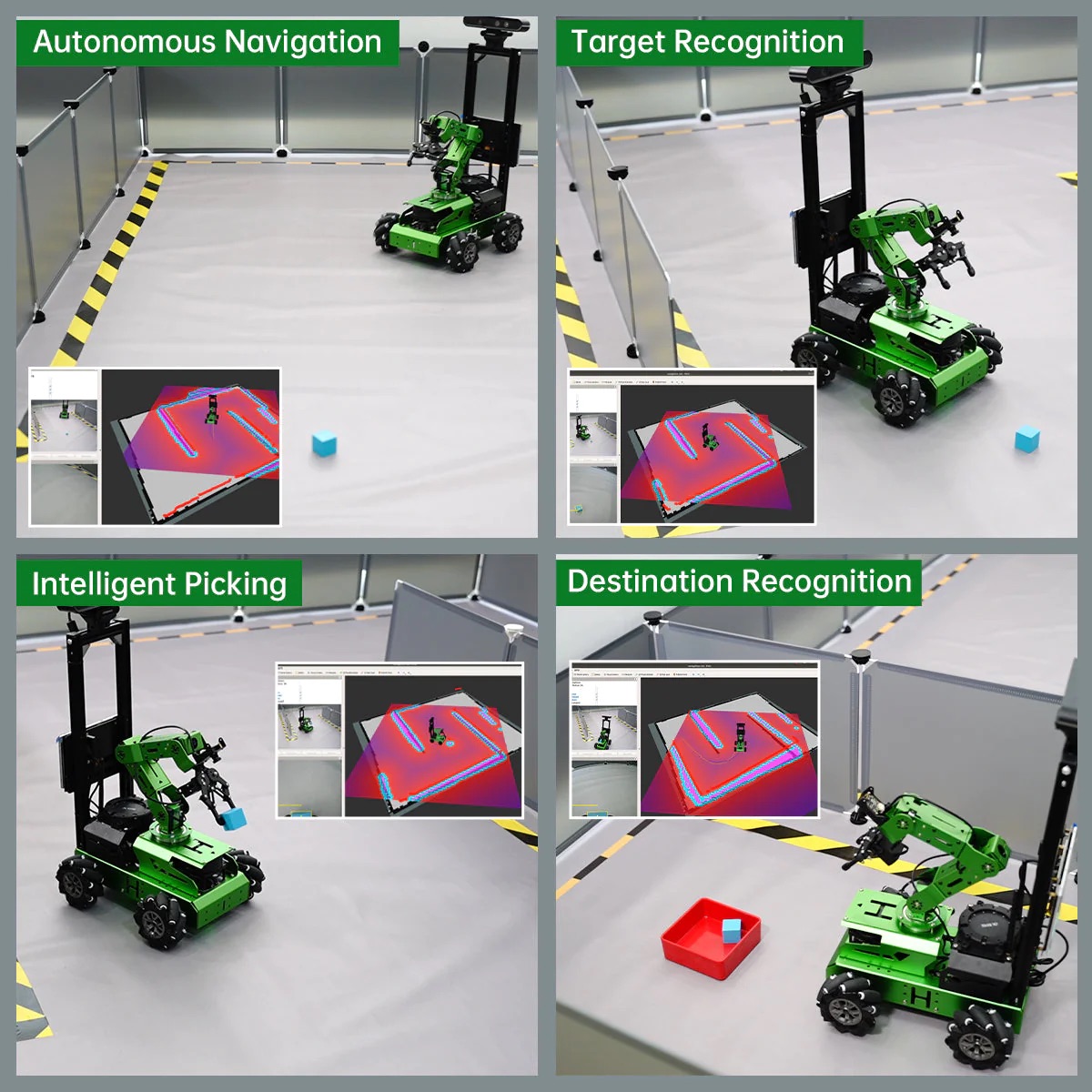
JetAuto Pro est un robot ROS complet 2 en 1 adapté à l'apprentissage ROS. Jetson Nano ouvre plus de fonctions. Le contrôle du mouvement des robots, la cartographie et la navigation, la planification des chemins, le suivi et l'évitement des obstacles, la conduite autonome, le choix intelligent, la simulation MoveIt, l'interaction somatosensorielle et l'interaction vocale peuvent tous être réalisés !
NVIDIA Jetson Nano est capable d'exécuter des frameworks d'apprentissage profond grand public, tels que TensorFlow, PyTorch, Caffe/ Caffe2, Keras, MXNet. Fournir une puissance de calcul puissante pour les projets d'IA massifs. Propulsé par Jetson Nano, JetAuto Pro peut mettre en œuvre la reconnaissance d'images, la détection et le positionnement d'objets, l'estimation des poses, la segmentation sémantique, l'analyse intelligente et d'autres fonctions tout-puissantes.
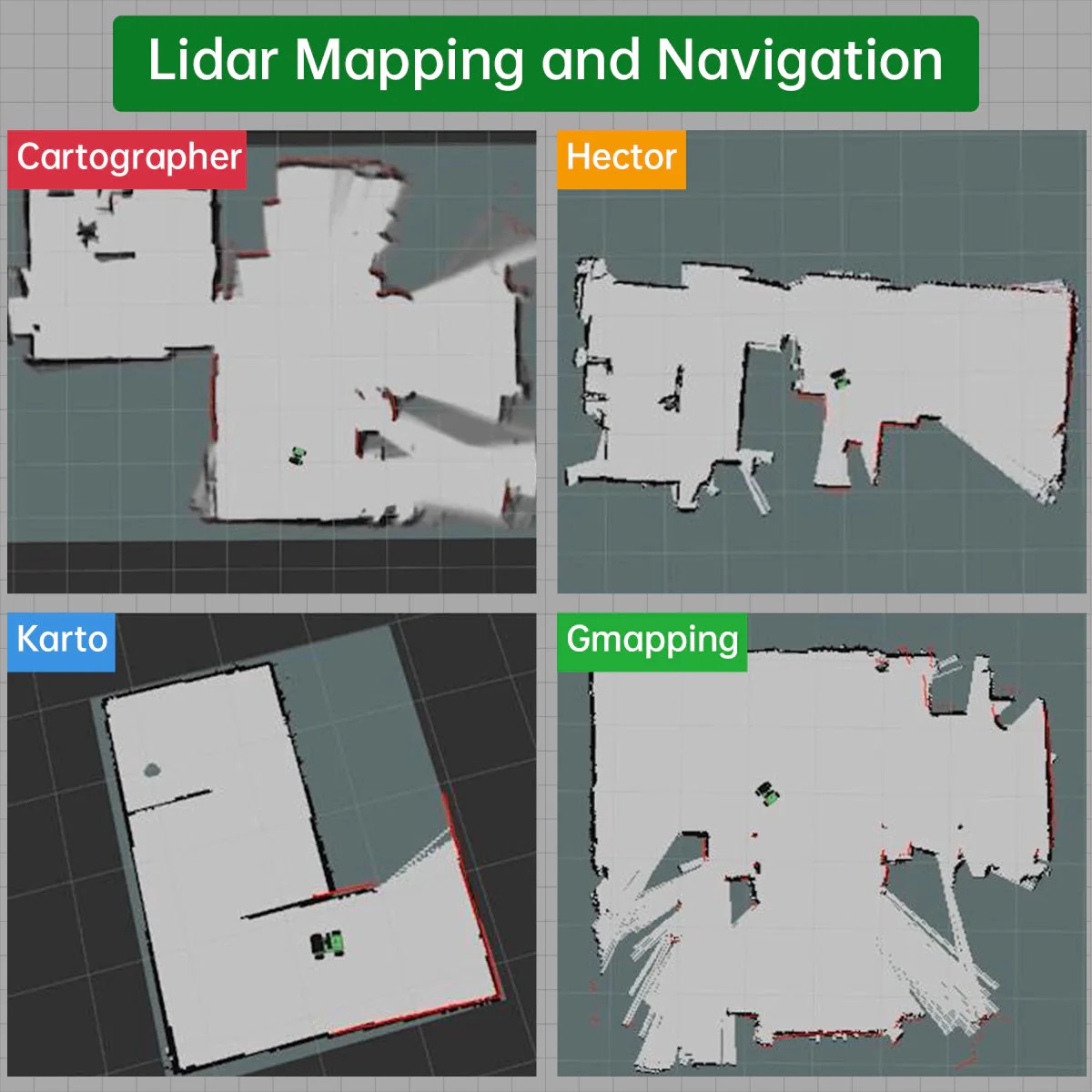
Cartographie et navigation Lidar 2D
JetAuto Pro est chargé d'un Lidar haute performance qui prend en charge le mappage avec divers algorithmes, y compris Gmapping, Hector, Karto et Cartographer. En outre, la planification des chemins, la navigation à points fixes ainsi que l'évitement des obstacles au milieu de la navigation peuvent être mis en œuvre.
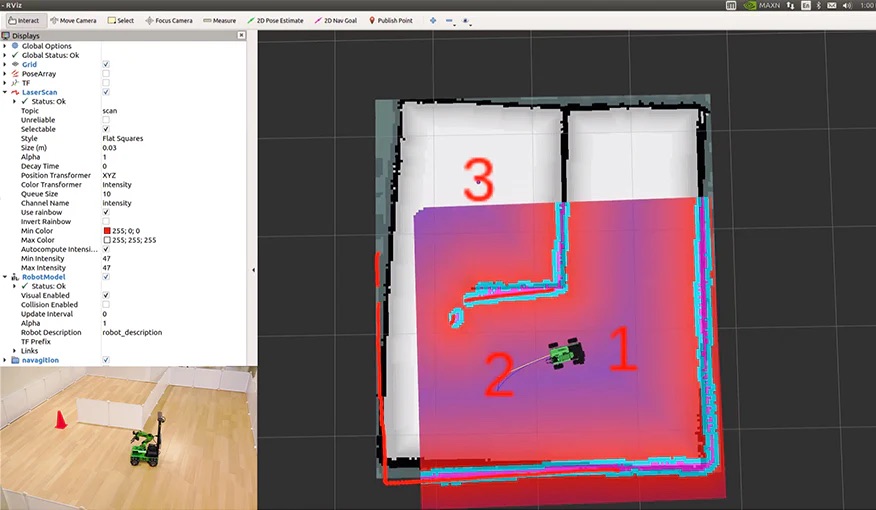
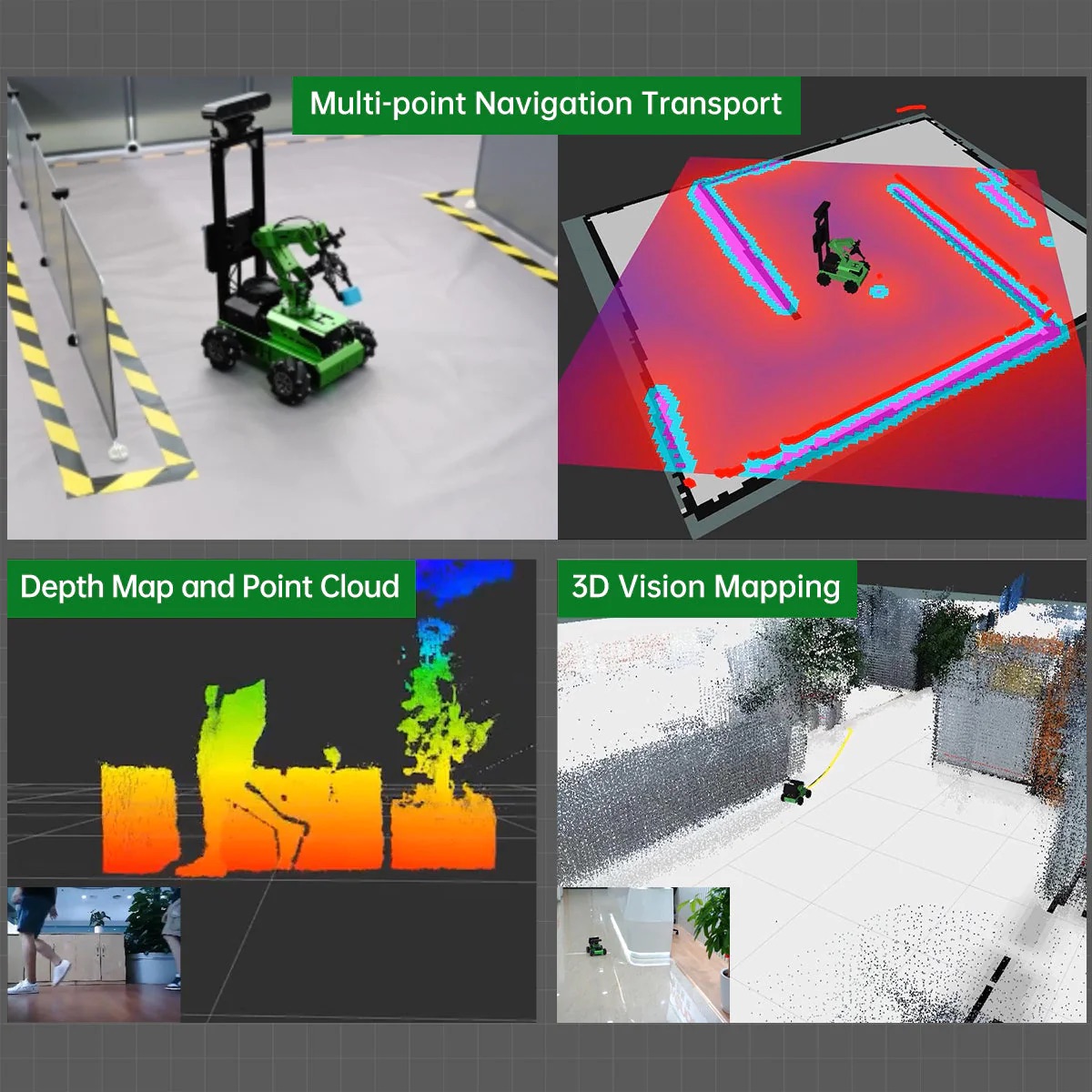
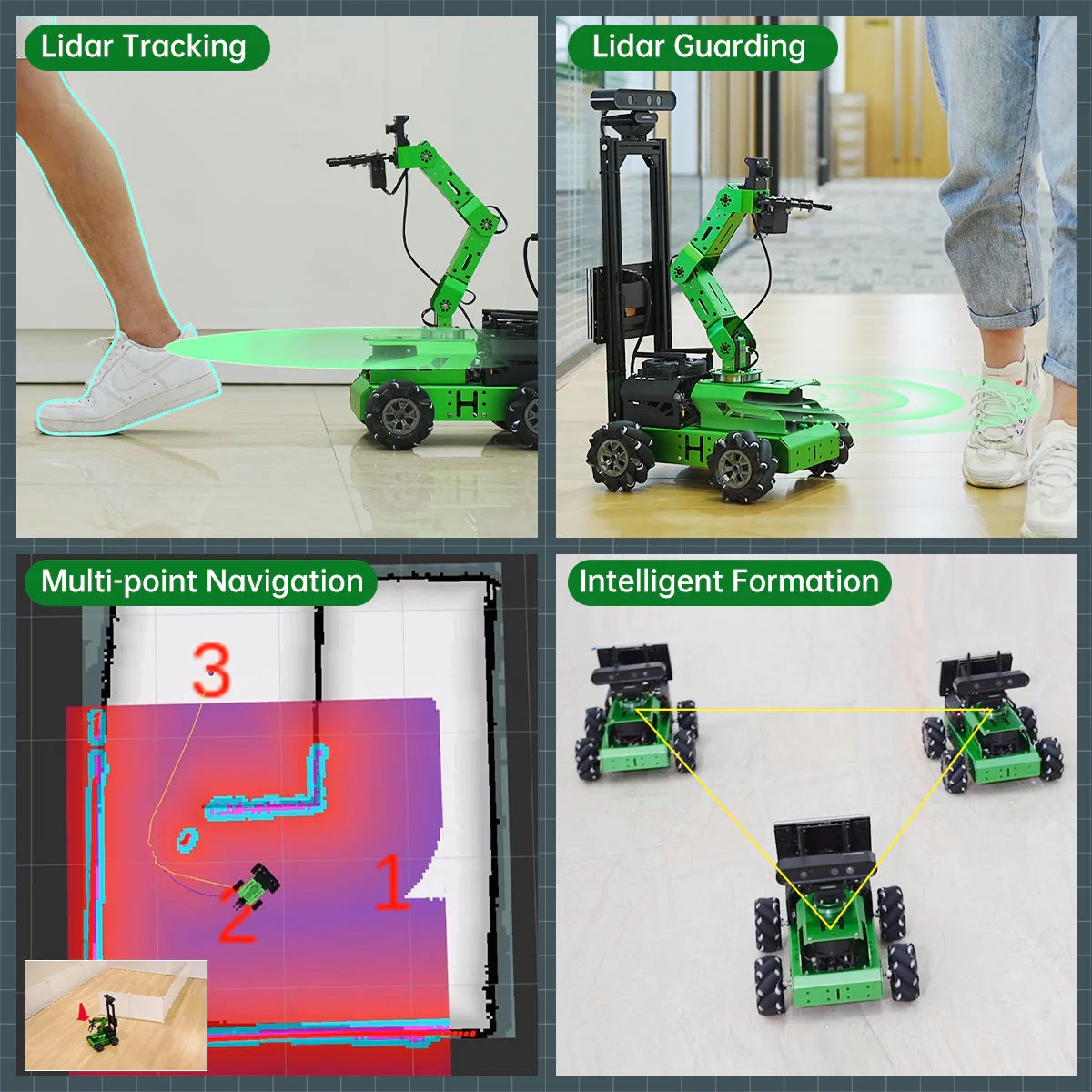
Navigation À Un Point, Navigation À Plusieurs Points
JetAuto Pro utilise Lidar pour détecter l'environnement en temps réel afin de réaliser une navigation à un seul point ainsi qu'une navigation à plusieurs points.
Planification des chemins TEB, évitement des obstacles
Il prend en charge la planification du chemin TEB et est capable de surveiller l'obstacle en temps réel pendant la navigation. Par conséquent, il peut replanifier l'itinéraire pour éviter l'obstacle et continuer à se déplacer.
Cartographie de l'exploration autonome RRT
En adoptant l'algorithme RRT, JetAuto Pro peut effectuer la cartographie d'exploration, enregistrer la carte et revenir au point de départ de manière autonome, de sorte qu'il n'y a pas besoin de contrôle manuel.
Suivi Lidar
En scannant l'objet en mouvement avant, Lidar rend le robot capable de suivre la cible.
Protection Lidar
Protégez l'environnement et sonnez l'alarme lorsque vous détectez des intrus.
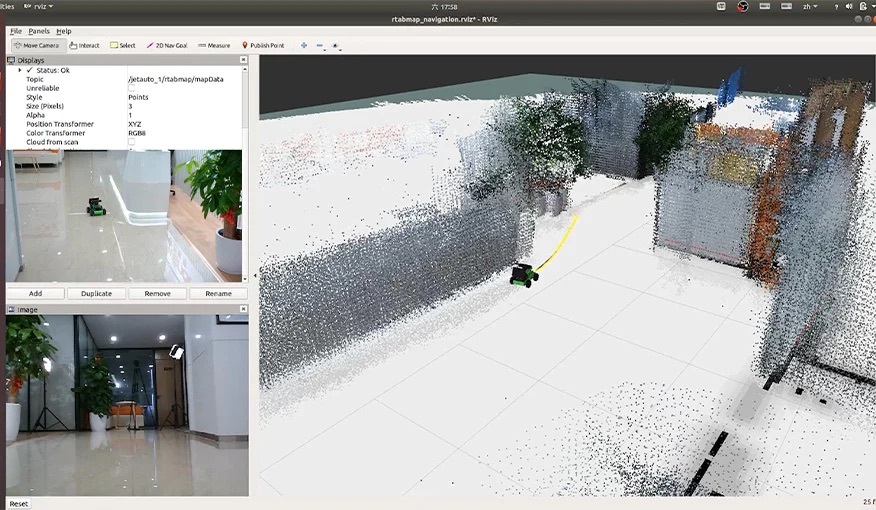
RTAB-VSLAM Cartographie et navigation 3D
La caméra de profondeur prend en charge la cartographie 3D de deux façons, la vision RTAB pure et la fusion de la vision et le Lidar, ce qui permet à JetAuto Pro de naviguer et d'éviter les obstacles dans la carte 3D, ainsi que de se déplacer dans le monde entier.
Données de carte de profondeur, nuage de points
Grâce à l'API correspondante, JetAuto Pro peut obtenir une carte de profondeur, une image couleur et un nuage de points de l'appareil photo.
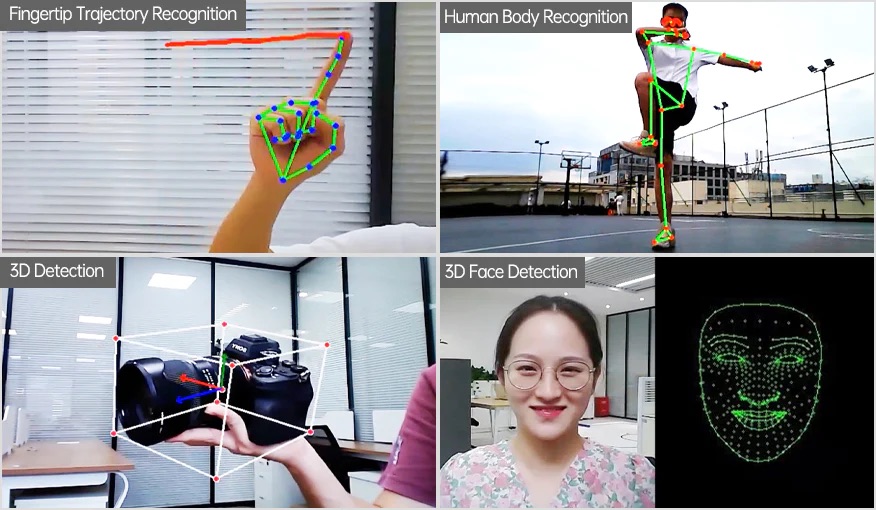
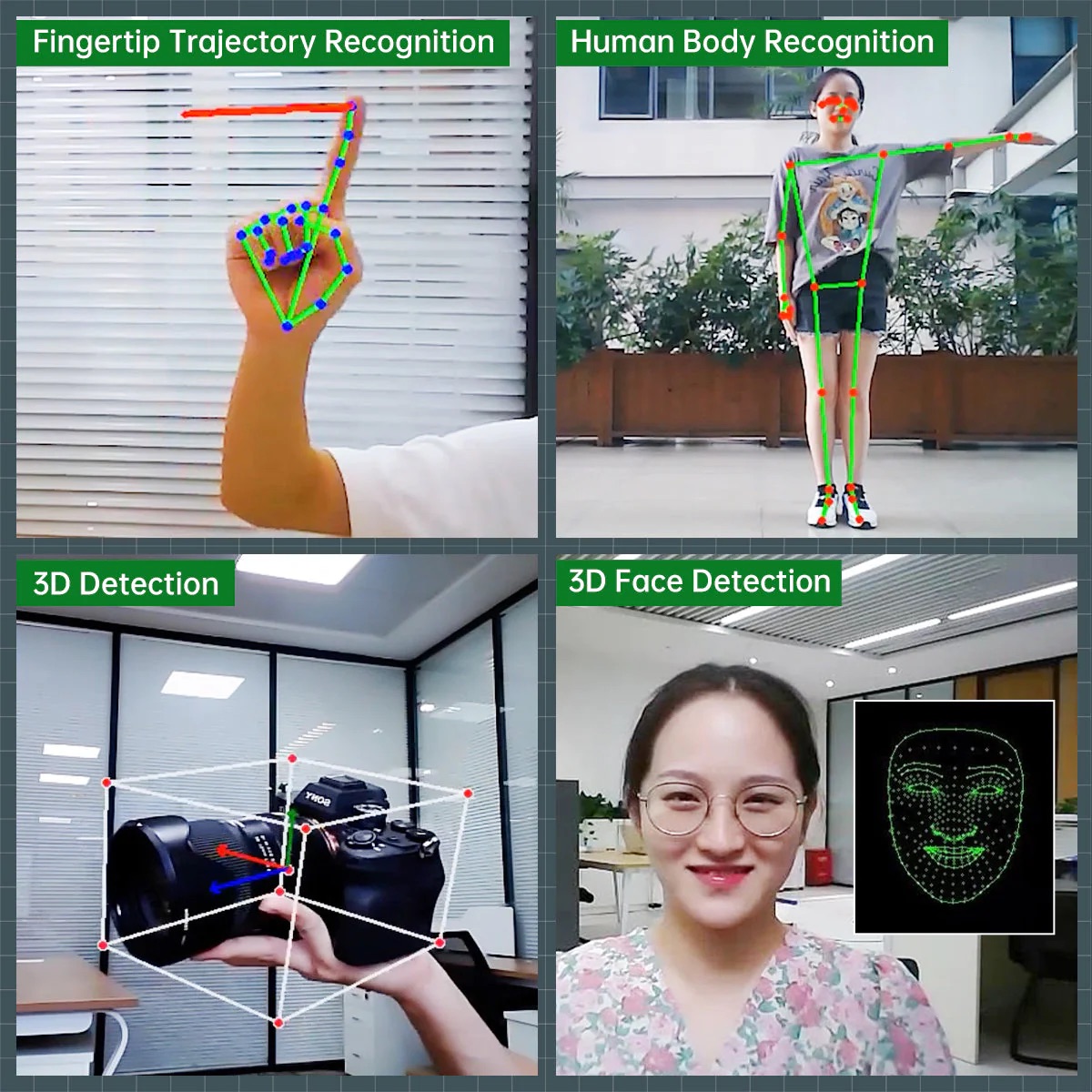
Développement de MediaPipe, interaction IA mise à niveau
Basé sur le cadre MediaPipe, JetAuto Pro peut effectuer la reconnaissance du corps humain, la détection du bout des doigts, la détection des visages, la détection 3D et plus encore.
Reconnaissance et suivi des couleurs/étiquettes
JetAuto Pro est capable de reconnaître et de suivre la couleur désignée, et peut reconnaître plusieurs balises d'avril et leurs coordonnées en même temps.
Navigation Multi-véhicules
En fonction de la communication multi-machines, JetAuto Pro peut réaliser une navigation multi-véhicules, une planification de trajectoires et une évitement intelligent des obstacles.
Système d'exploitation du robot ROS
ROS est un méta-système d'exploitation open source pour les robots. Il fournit certains services de base, tels que l'abstraction matérielle, le contrôle des périphériques de bas niveau, la mise en œuvre de fonctionnalités couramment utilisées, le passage de messages entre les processus et la gestion des packages. Et il offre également les outils et les fonctions de bibliothèque nécessaires pour obtenir, compiler, écrire et exécuter du code sur tous les ordinateurs. Il vise à fournir un soutien à la réutilisation du code pour la recherche et le développement en robotique


 Payer avec Visa
Payer avec Visa
 Payer avec MasterCard
Payer avec MasterCard
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer