

Crédits photos : Hiwonder
Robot contruction et programmation voiture Hiwonder JetAuto ROS Jetson Nano écran tactile caméra Lidar cartographie SLAM navigation édition avancée
1,989.00€ TTC
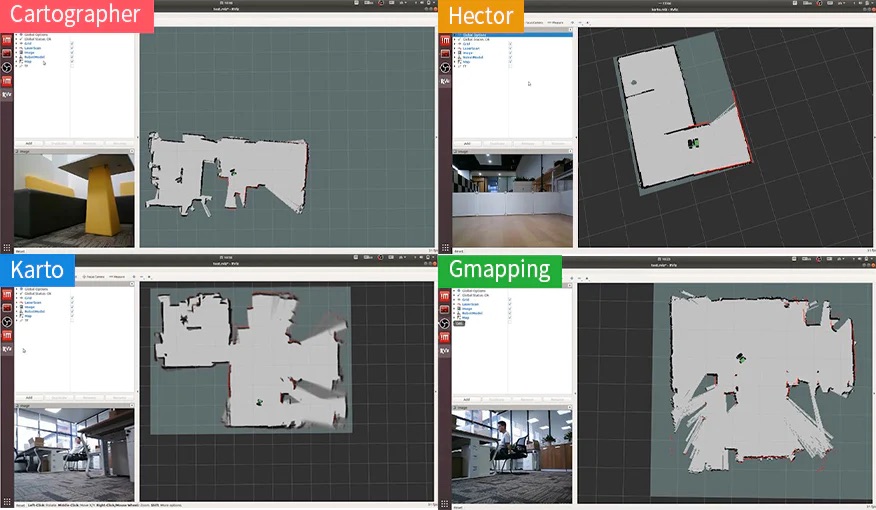
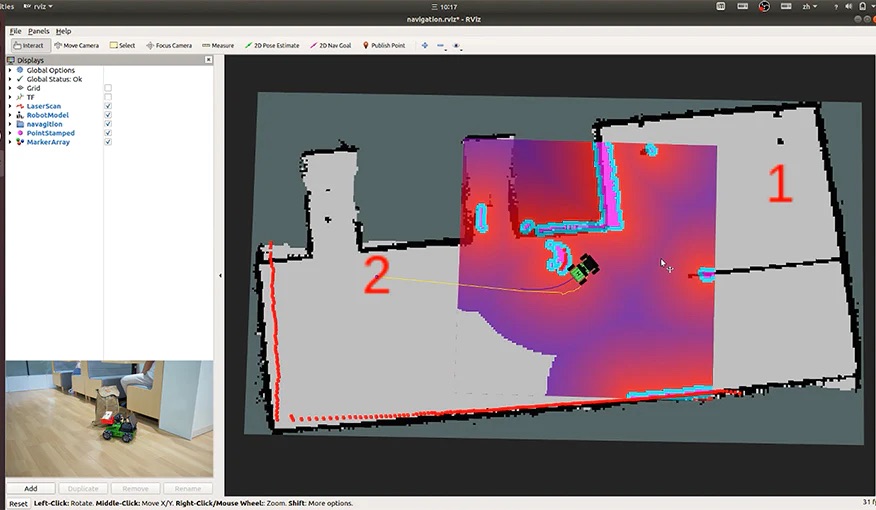
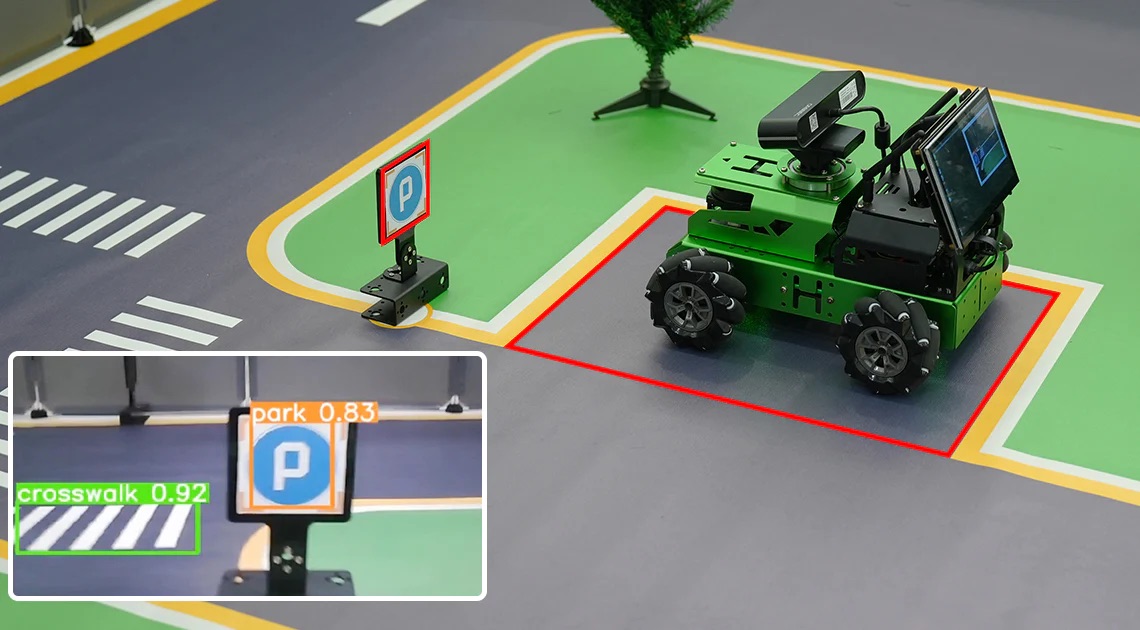
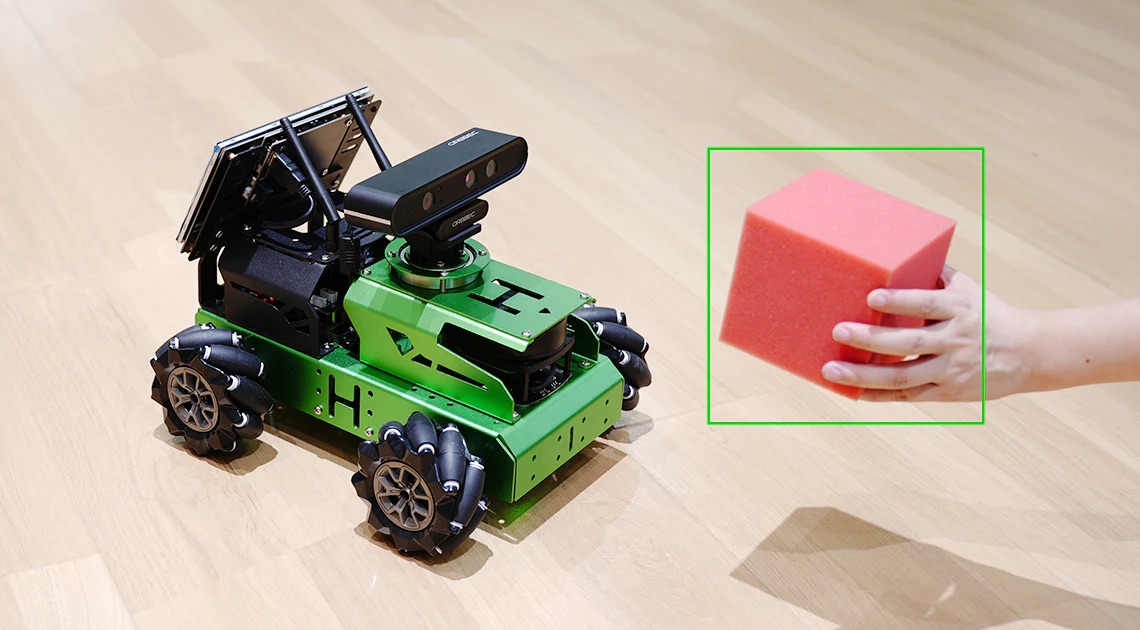
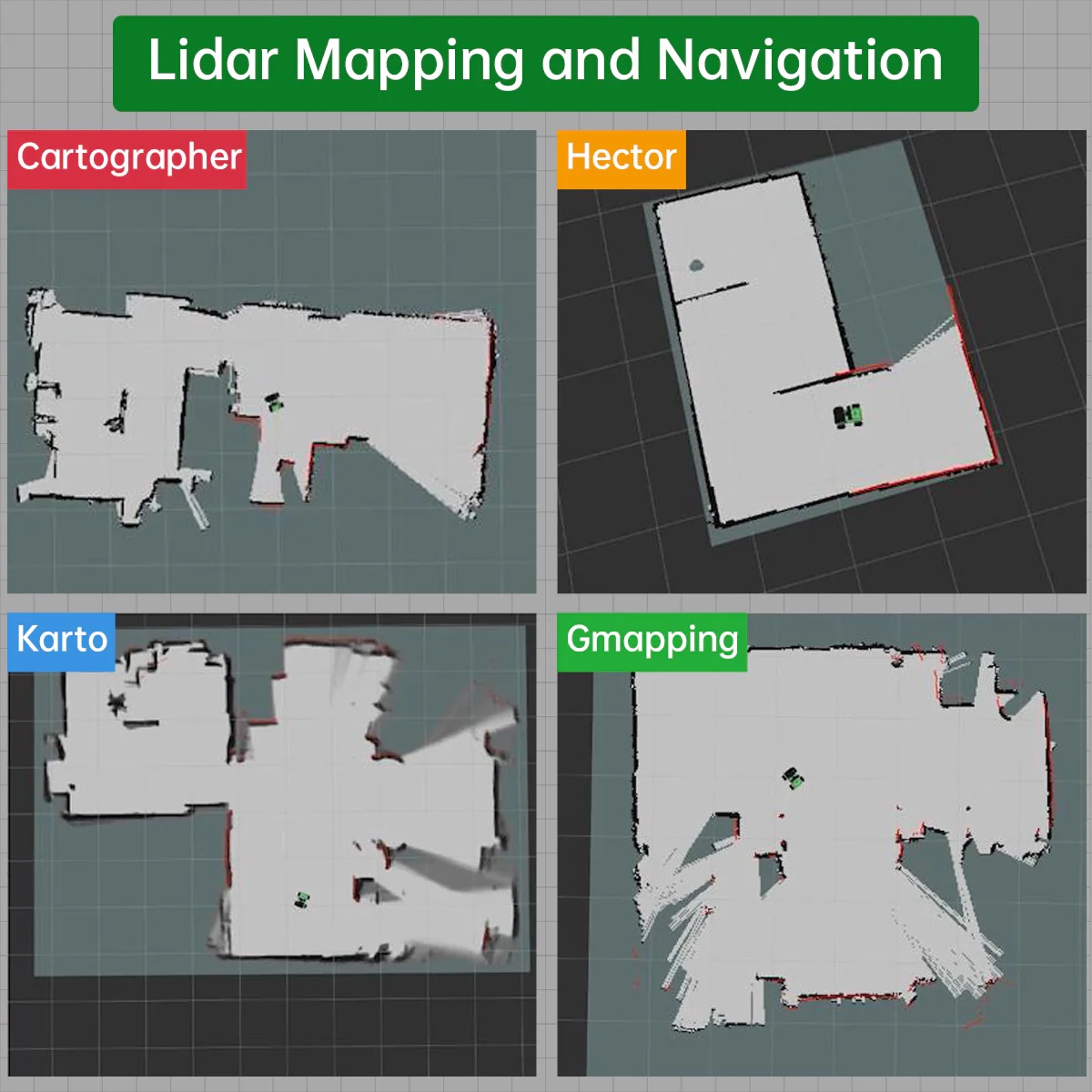
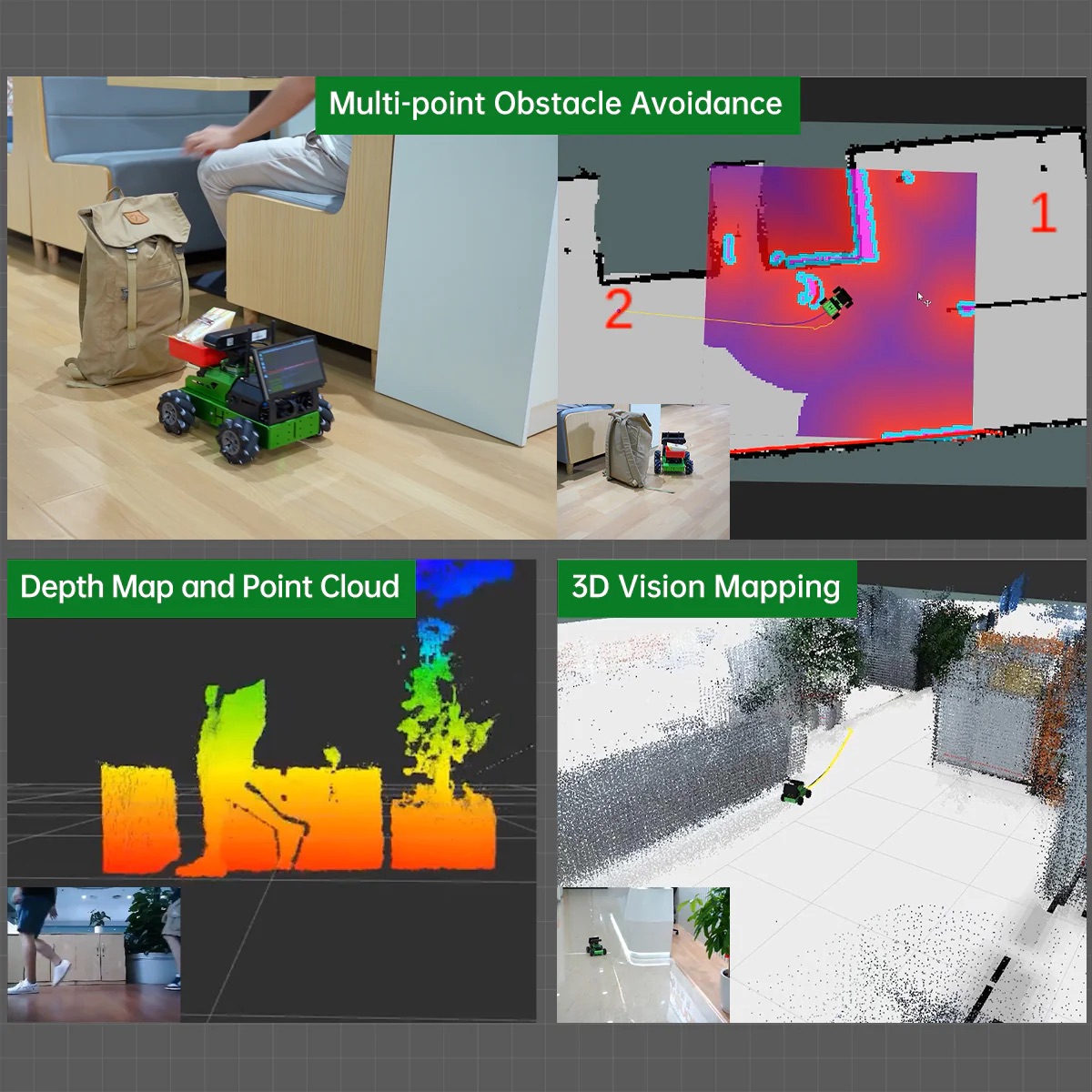
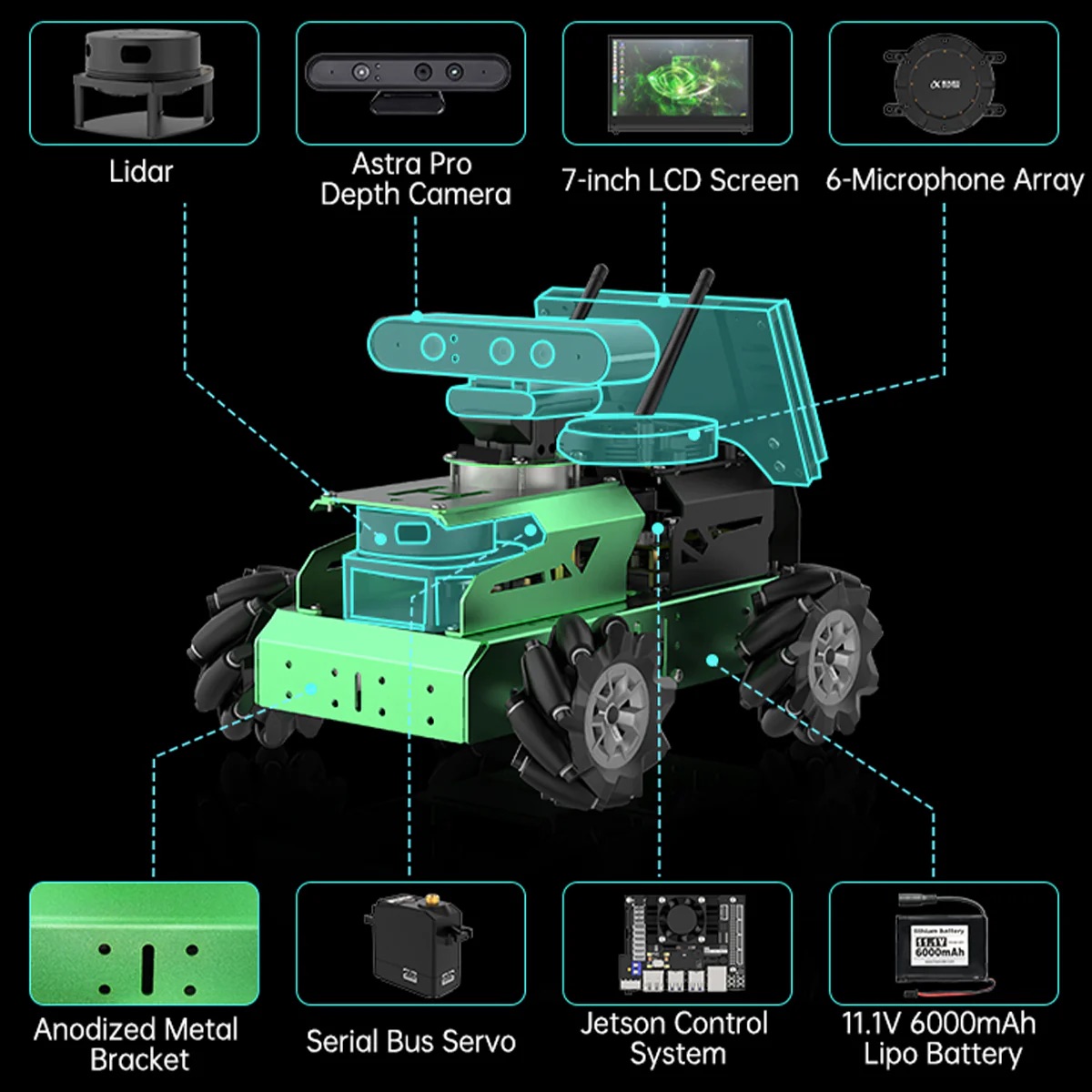
JetAuto est une voiture robot ROS d'entrée de gamme adaptée à l'éducation ROS. Il est chargé de NVIDIA Jetson Nano, d'un moteur d'encodeur haute performance, d'un lidar et d'une caméra de profondeur 3D, ce qui ouvre plus de fonctionnalités. Le contrôle du mouvement des robots, la cartographie et la navigation, la planification des chemins, le suivi et l'évitement des obstacles, la conduite autonome, la reconnaissance des caractéristiques humaines, l'interaction somatosensorielle et l'interaction vocale peuvent tous être réalisés !
PAIEMENT & SECURITÉ
 Payer avec Visa
Payer avec Visa
 Payer avec MasterCard
Payer avec MasterCard
Payer avec PayPal
 Payer avec Chorus
Payer avec Chorus
 Payer par Chèque
Payer par Chèque
 Payer avec Bank Transfer
Payer avec Bank Transfer